Dalla metamorfosi di "Cartesio", [René Descartes] il grande matematico, si vuole far sintesi tra le antiche basi matematiche, completamente necessarie al nostro progetto, e le più moderne tecnologie dei giorni nostri, dove tutto scambia dati, per generare il nome della nostra applicazione: Cartes-IO.
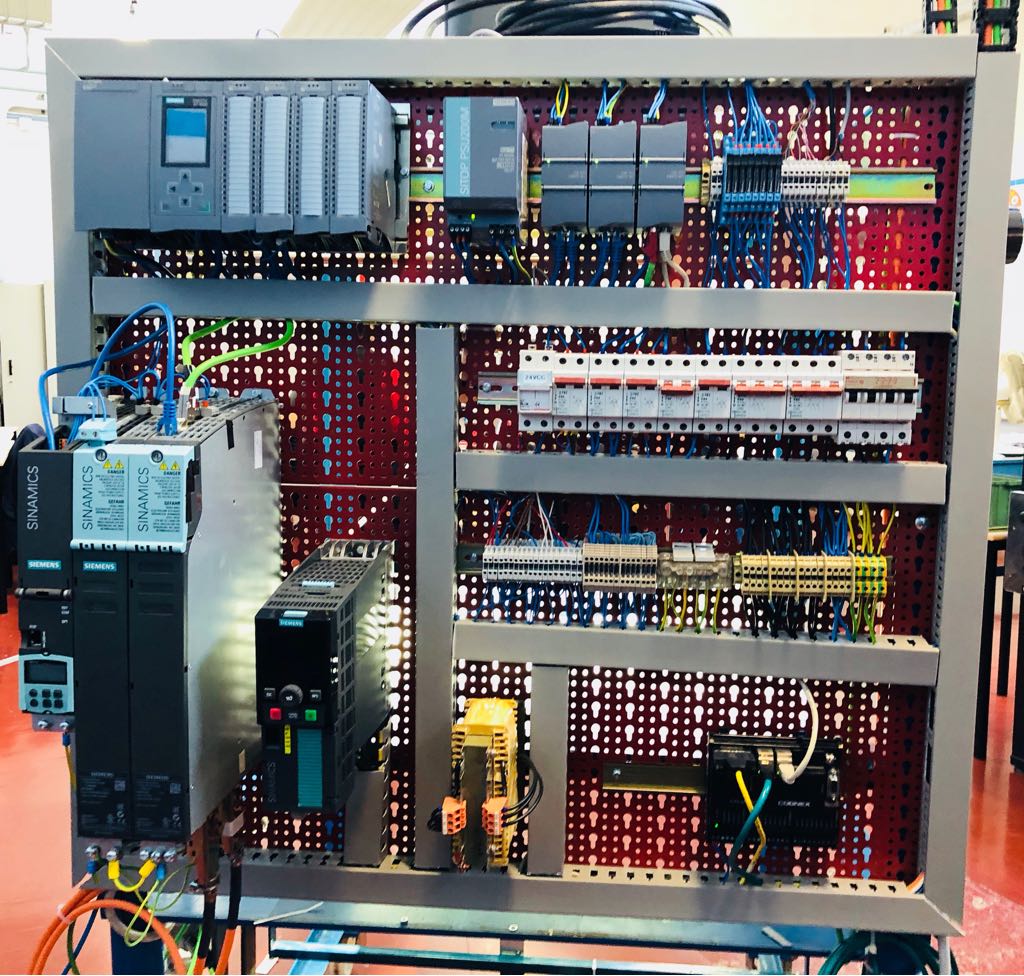
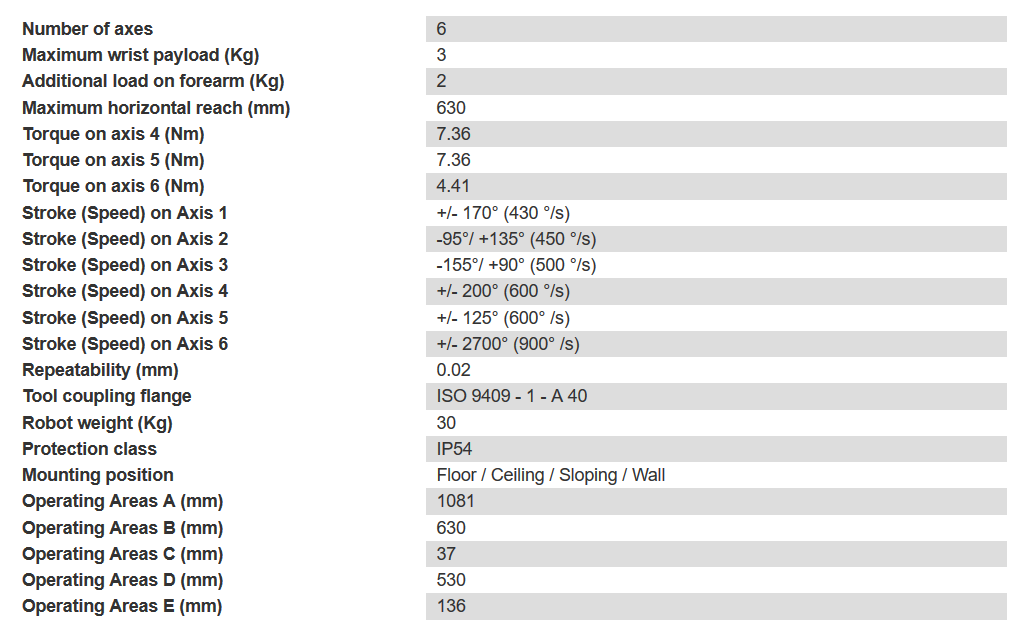
Si tratta di un classico problema di automazione industriale di pick and place fatto, in questo caso, con due robot, uno cartesiano ed uno antropomorfo. Il primo è stato completamente costruito a scuola e azionato con servosistemi della famiglia S120 di Siemens, viceversa, quello antropomorfo, è simulato a video disponendo solo della CPU del robot Comau. Più semplicemente il software del robot è completamente reale come l'interfaccia tra lo stesso ed il PLC, ciò che viene simulato a video è il movimento di pick and place non disponendo del braccio reale.
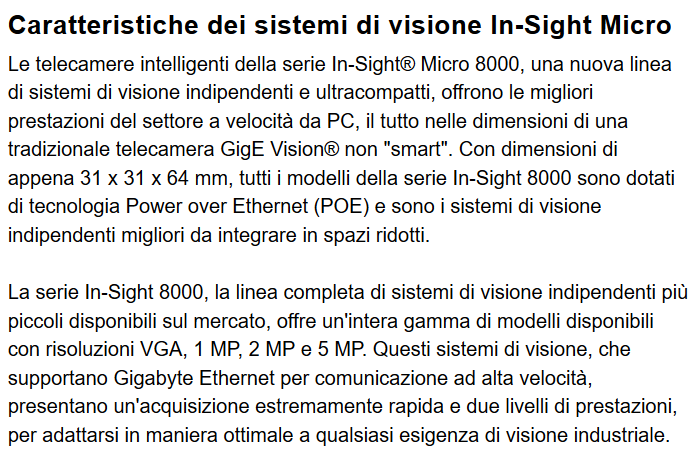
Nell'automazione sempre più spesso è presente visione artificiale che svolge compiti diversificati; il supporto di Cognex, leader di mercato del settore, ci ha permesso di implementare una interessate applicazione di riconoscimento di forme. Utilizzando la tecnica di back light, su un piano semitrasparente vengono posizionati oggetti con forme diversificate (cerchi, triangoli, quadrati, stelle e pentagoni) che, opportunamente illuminati, vengono riconosciuti dalla telecamera posta sul lato opposto.
La videocamera, collegata in rete PROFINET con il PLC, a seguito di specifica richiesta fatta dall'operatore, tramite pannello KTP700, fornisce numero e posizione di tutti i componenti riconosciuti all'interno dell'area di lavoro utile.
Come suddetto il robot cartesiano dispone di due assi, X ed Y, servoassistiti mentre l'asse Z è pneumatico con un comando ON-OFF per la movimentazione di una elettrocalamita utilizzata per prelevare i componenti dal piano di lavoro.
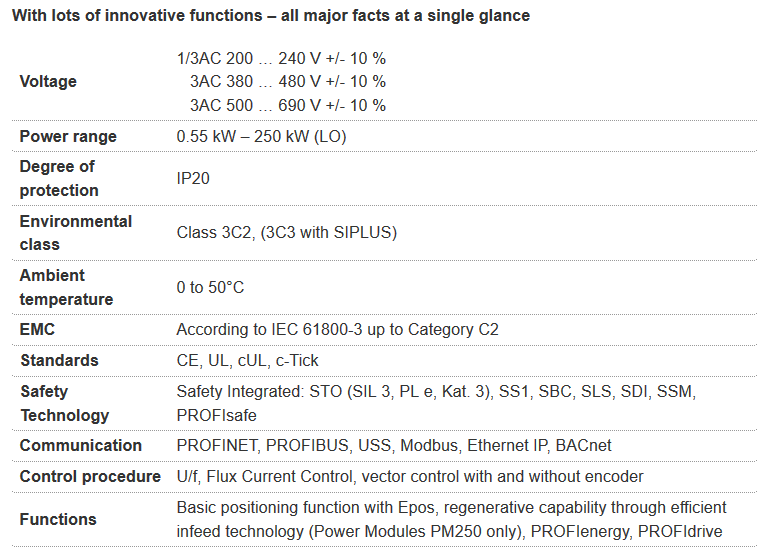
Avendo anche un inverter della famiglia G120 con motore asincrono retroazionato da encoder, abbiamo pensato di utilizzarlo per collegare i due robot, il cartesiano ed l'antropomorfo. In sostanza si utilizza l'azionamento dell'asincrono per movimentare una possibile tavola rotante che passa i pezzi scaricati dal cartesiano alla zona di prelievo del robot Comau.
In un'ottica I4.0 si è pensato di integrare l'intero sistema con una prestazione user friendly tramite "occhietti dinamici" che seguono il ciclo macchina in tutte le sue fasi in una approssimazione di applicazione COBOT almeno dal punto di vista di accettabilità da parte dell'operatore.
Componenti:
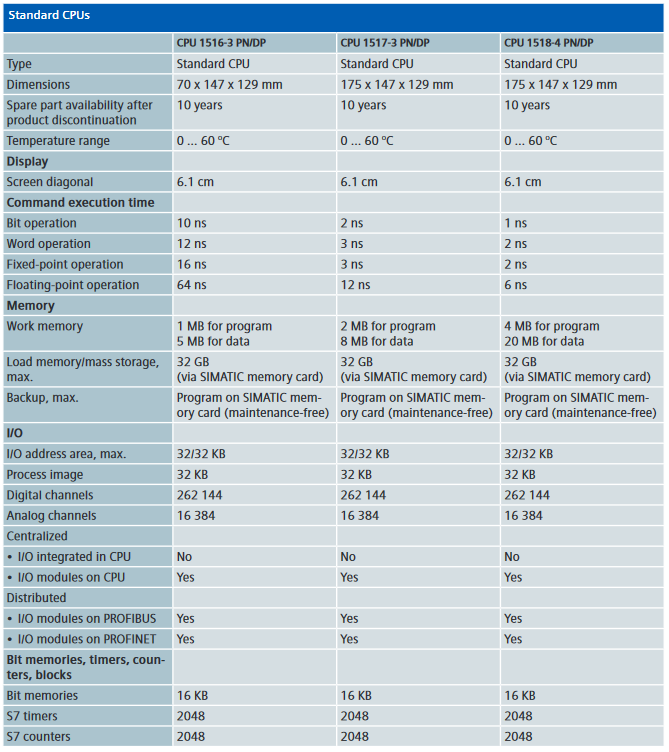
Siemens Cpu S7 1516
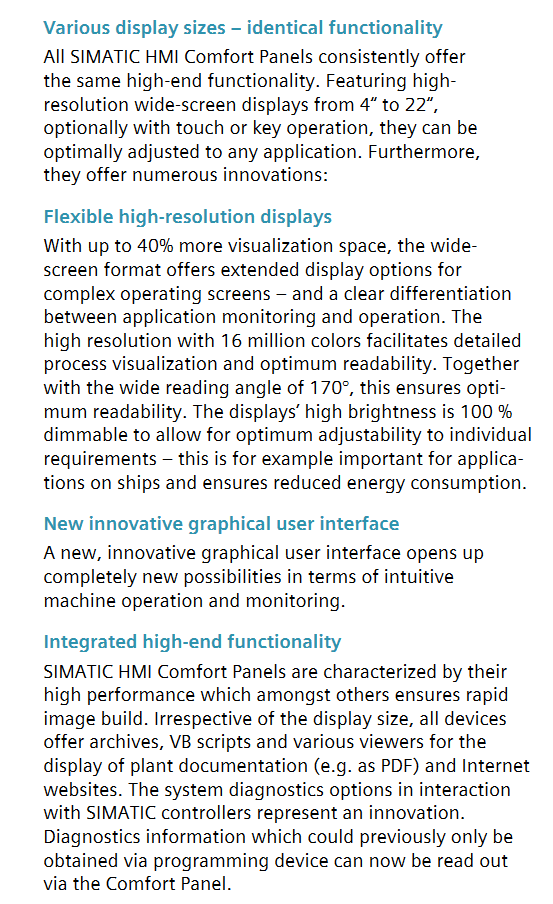
Interfaccia HMI Friendly
Cognex Intelligent Camera
Drive Sinamics S120.
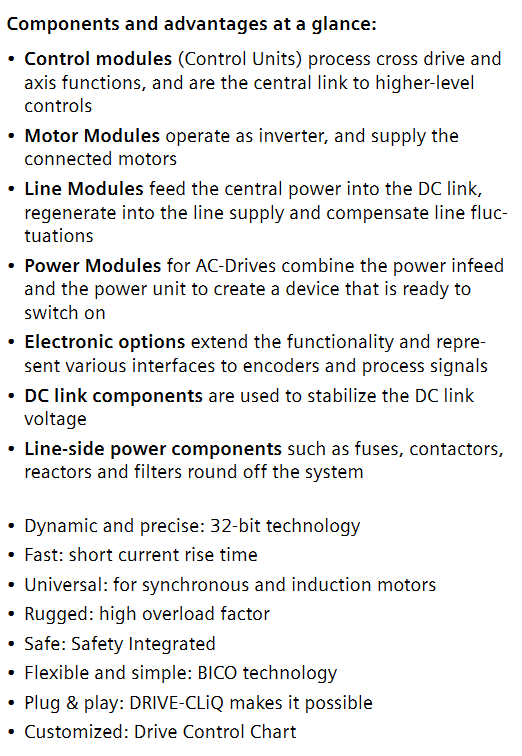
Drive Sinamics G120
Robot Comau
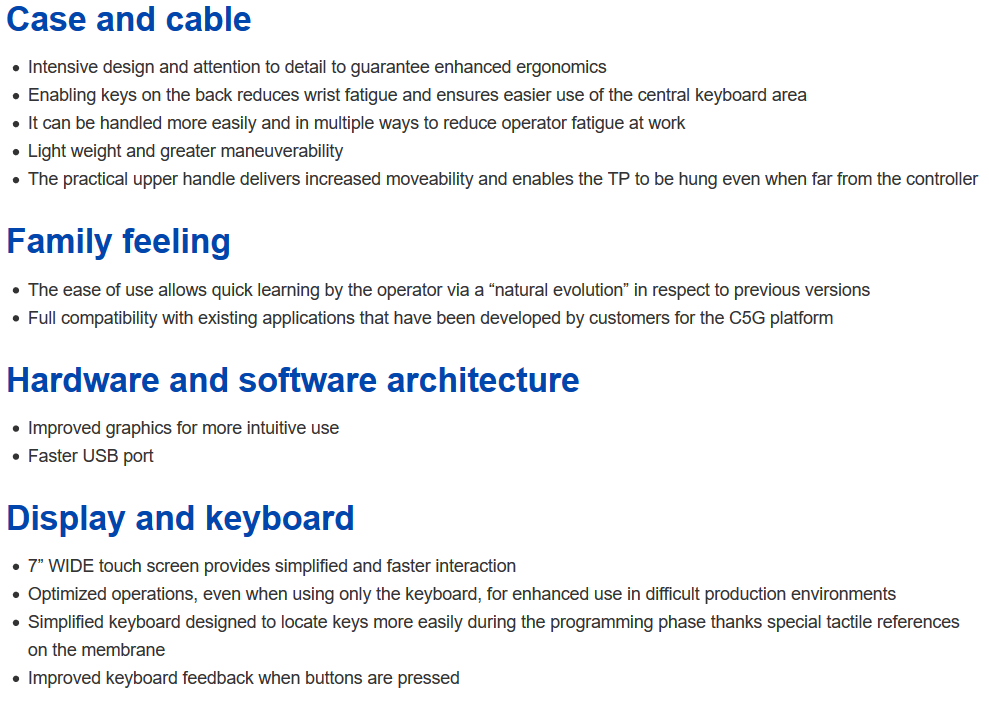
Comau Teach Pendant 5.